
О влиянии трения гидромотора на характеристики гидропривода
Авторы: Зайцев А.А., Круглов В.Ю., Медведев А.В., Чиркин Ф.Е., Валиков В.П.
ФГУП ВНИИ "Сигнал"
Наибольшее распространение среди приводов стабилизации и наведения получили системы с пропорциональным управлением. Для которых характерно то, что скорость, развиваемая исполнительным элементом, в первом приближении пропорциональна сигналу рассогласования между входом и выходом системы и чем ближе объект регулирования к согласованному положению, тем меньше скорость. Поэтому от гидромотора, как исполнительного элемента, часто требуется не только высокие быстродействие или КПД (при номинальных режимах работы), но и линейность характеристик в зоне малых скоростей вращения вала или устойчивость работы гидромотора на заданной минимальной скорости.
Анализ литературы по данному вопросу показывает, что для большинства гидромашин существенной и определяющей нелинейностью при малых скоростях вращения вала является трение в ходовых частях.
Объекты сравнительных исследований:
- аксиально-поршневой гидромотор с наклонным блоком и двойным несиловым карданом III-гаммы рабочим объемом 20 см3/об; данный вид гидромашин нашел широкое применение в силовых следящих приводах;
а- ксиально-поршневой гидромотор с наклонным диском и гидростатическими опорами рабочим объемом 20 см3/об, как не нашедший применения в следящих приводах вследствие неудовлетворительной работы на малых скоростях.
Задачи исследований:
- выявить влияние механических потерь в гидромоторе на характеристики привода, работающего при малых управляющих сигналах;
- установить принципиальную возможность применения плунжерных гидромашин в силовом следящем приводе.
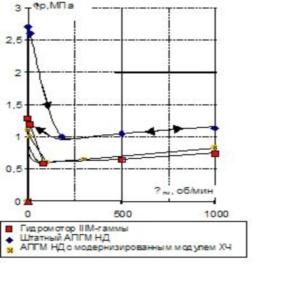
Для сравнительных исследований были получены зависимости потерь давления на гидромоторах при разных частотах вращения вала, рис.1.
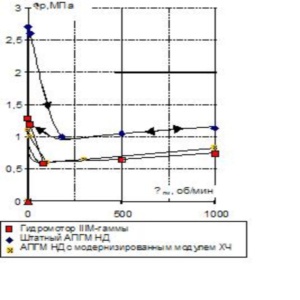
Рис.1. Зависимость потерь давления на гидромоторе от частоты вращения вала.
Как видно характеристика имеет падающий характер в зоне малых частот вращения вала. Разность давлений в силовых полостях, необходимая для начала движения (страгивания) в 2,3 раз больше разности давлений, необходимой для поддержания вращения вала с постоянной скоростью, что обуславливает так называемый эффект «отрицательного» сопротивления. В результате работа гидромотора в зоне малых скоростей неустойчива, сопровождается появлением автоколебаний и периодической или полной остановкой гидромотора.
Аналогичная характеристика была получена для доработанного аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами в части снижения механических потерь в модуле ХЧ. При этом большая часть составных частей, и соответственно, габаритные размеры в гидромашины остались прежними. Величина и динамика объемных потерь также сохранились.
Согласно графику рис.1. характеристика механических потерь АПГМ НД по плавности, величине давления страгивания стала не хуже, чем у АПГМ НБ-аналога.
Аналогичная характеристика была получена для доработанного аксиально-поршневого гидромотора с наклонным диском и гидростатическими опорами в части снижения механических потерь в модуле ХЧ. При этом большая часть составных частей, и соответственно, габаритные размеры в гидромашины остались прежними. Величина и динамика объемных потерь также сохранились. Согласно графику рис.1. характеристика механических потерь АПГМ НД по плавности, величине давления страгивания стала не хуже, чем у АПГМ НБ-аналога.
Теперь рассмотрим работу данных гидромашин в составе силовой части гидропривода объемного регулирования. Для чего удобнее воспользоваться методом математического моделирования, как достаточно наглядного и позволяющего учесть указанный характер нелинейности. Расчетная (принципиальная) схема привода представлена на рис.2, имитационная, выполненная в ПО MatLab/Simulinc - на рис.3. В основе модели - уравнения расходов, записанные для каждой гидролинии, уравнение моментов на валу гидромотора. Модели гидромотора, насоса, подпиточных клапанов и гидролиний разработаны и дополнены экспериментальными характеристиками так, что должны имитировать работу реальных агрегатов реально существующего гидропривода.
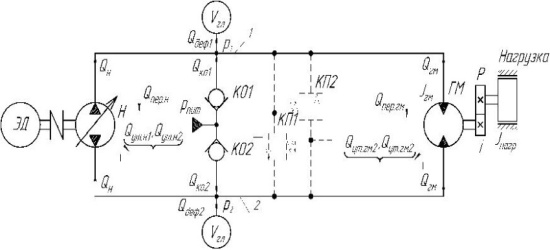
Рис.2. Принципиальная схема силовой части гидропривода объемного регулирования.
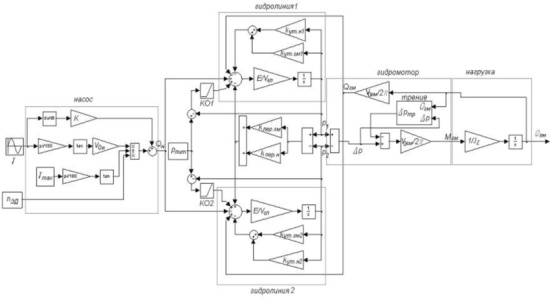
Рис.3. Имитационная модель силовой части гидропривода.
Полученные выше характеристики гидромеханических потерь, были аппроксимированы кусочно-линейными функциями и введены в модель в виде отдельного блока «трение». Математическое описание и реализация данного блока представлены на рис.4, где k, k1- коэффициенты полученные при аппроксимации характеристик.
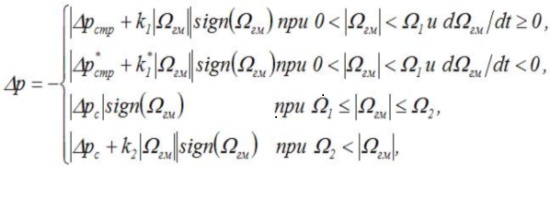
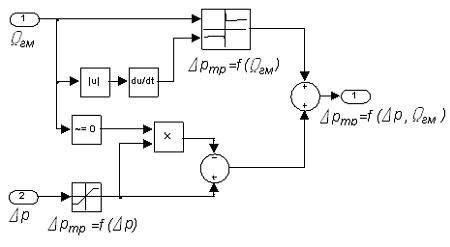
Рис.4-5 Реализация блока «трение» в модели.
Результаты моделирования работы различных исполнений гидромоторов а также результаты осциллографирования реального привода, включающего гидромотор с наклонной шайбой с доработанной ХЧ представлены на рис.4 (входной сигнал - синусоидальный, амплитудой 0,1 Y max, где Y max максимальный угол отклонения люльки насоса и частотой 0,4 Гц, нагрузка - инерционная). Сравнение с экспериментальными данными позволяет судить о сходимости результатов моделирования с данными эксперимента по величине зоны нечувствительности привода и характеру отработки входного сигнала.
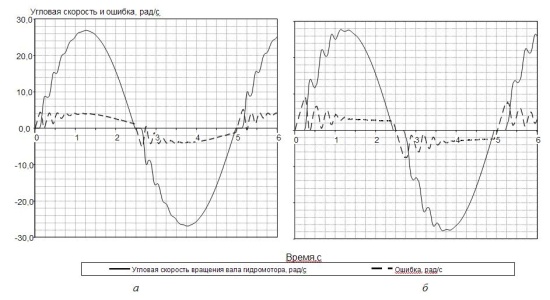
Рис.6. График зависимости частоты вращения вала аксиально-поршневого гидромотора с наклонным блоком от времени при отработке синусоидального сигнала.
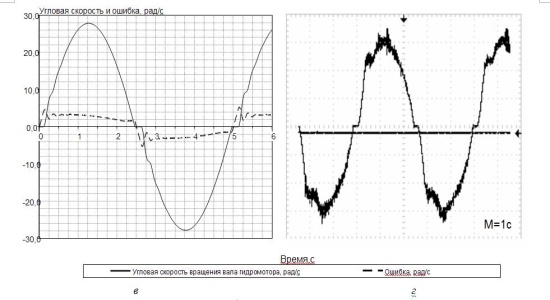
Рис.7. Результаты моделирования работы гидропривода: а - с гидромотором с наклонным блоком, б - с гидромотором с наклонной шайбой с штатной ХЧ, в - с гидромотором с наклонной шайбой с доработанной ХЧ; г - результаты осциллографирования гидропривода с гидромотором с наклонной шайбой с доработанной ХЧ.
Для оценки точности отработки управляющего сигнала силовой частью гидропривода было использовано понятие «ошибки» при отработке входного сигнала, как разности скорости вращения гидромотора идеализированного привода, представленного идеальным усилительным звеном, и рассматриваемого гидропривода с нелинейностью «отрицательное» сопротивление. Согласно результатам моделирования при подаче в качестве управляющего сигнала синуса малой амплитуды и частоты имеет место нечувствительность гидропривода по скорости нагрузки. При подходе люльки насоса к "нулю" вал гидромотора останавливается и начинает движение только когда входной сигнал достигает определенного значения. Указанный характер работы исполнительного элемента приводит к значительным ошибкам отработки входного сигнала.
Высокая разница между давлением страгивания и давлением, необходимым для поддержания вращения вала гидромотора с постоянной скоростью вызывают перерегулирования при начале движения гидромотора, т.к. резкое падение сил трения при страгивании можно рассматривать как дополнительное возмущающее воздействие. В замкнутом по скорости приводе при отработке статической ошибки рассогласования такое поведение гидромотора приводит к значительным «выбросам» по скорости с последующей остановкой нагрузки. В результате чего, статическая ошибка меняет знак, но по модулю оказывается больше изначальной, отработка малых статических ошибок за ограниченное время принципиально невозможна, – ухудшается разрешающая способность привода. Т.о. снижение потерь на трение при страгивании позволяет улучшить точностные характеристики гидроприводов и особенно приводов стабилизации и наведения вооружения.
Результаты установки аксиально-поршневым гидромотором с наклонным диском и гидростатическими опорами, в котором за счет конструктивных изменений удалось снизить механические потери при страгивании в реальный гидропривод продемонстрировали достоверность принятых положений об улучшении точностных показателей приводов стабилизации и наведения. В результате снижения давления страгивания в 2,3 раза, зона нечувствительности разомкнутого привода с АПГМ НД снизилась в 2,4 раза.































Неисправность при поступлении в ремонт – малая скорость движения погрузчика, заклинивание управления при поворотах.
Выявленная причина неработоспособности насоса – износ подпиточного насоса, износ роторных групп.
Проведенные работы – ремонт подпиточного насоса, замена прижимной пластины, замена двух комплектов поршней, восстановление поверхностей наклонных плит (люльки), блоков цилиндров, распределительных пластин.






Неисправность при поступлении в ремонт – шум при работе насоса, недостаточное рабочее давление.
Выявленная причина неработоспособности насоса – разрушение переднего и заднего подшипников вала, повреждение посадочного места подшипника в задней крышки, деформация шлицов вала.
Проведенные работы – замена подшипников, замена вала, ремонт задней крышки.




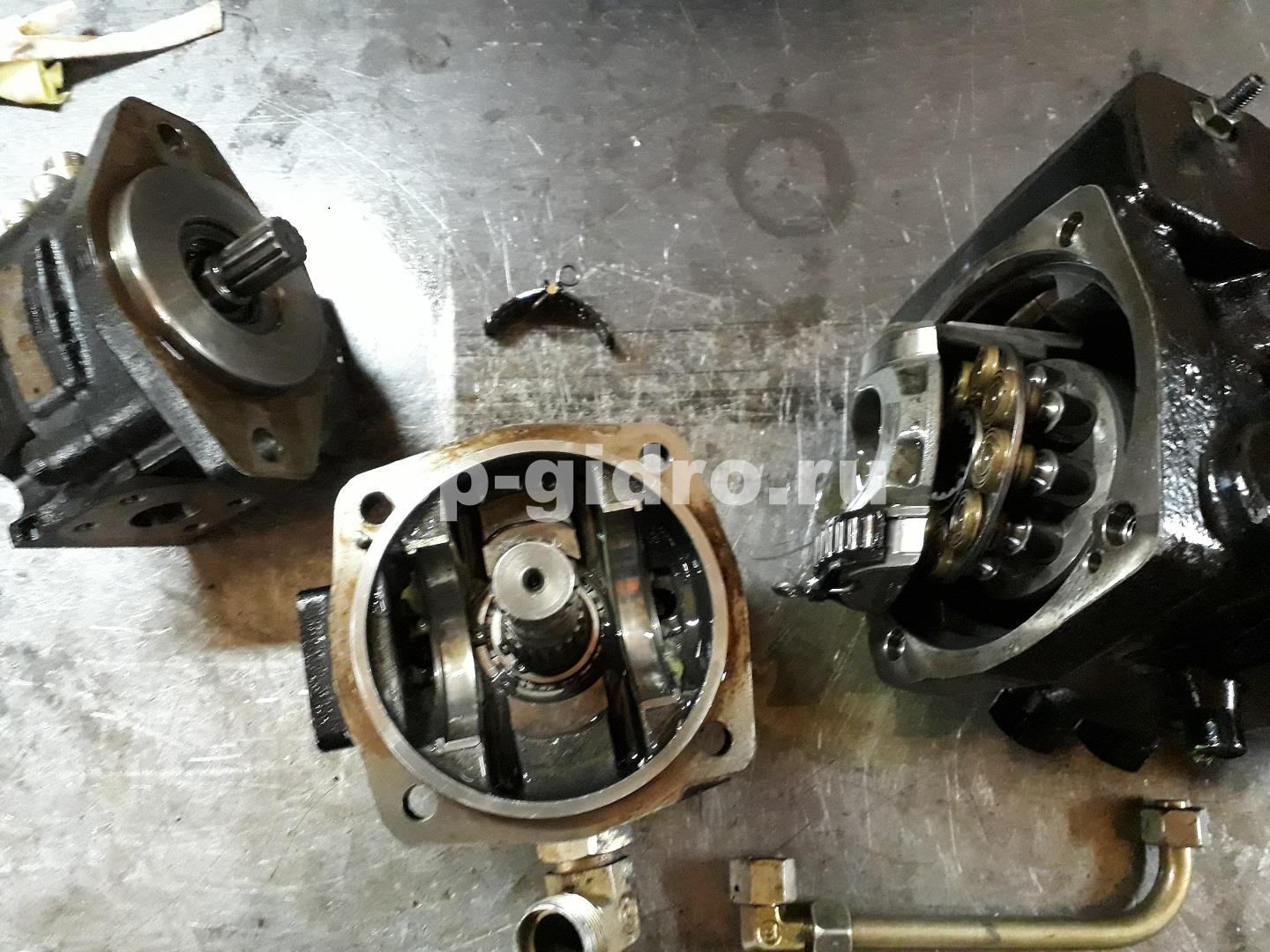
Неисправность при поступлении в ремонт – отсутствие подачи рабочей жидкости.
Выявленная причина неработоспособности насоса – заклинивание наклонной плиты (люльки) в нулевом положении.
Проведенные работы – замена люльки, замена опорных вкладышей.



Неисправность при поступлении в ремонт – заклинивание одного борта погрузчика при движении, отсутствие поворота.
Выявленная причина неработоспособности насоса – отрыв башмаков поршней, повреждения люльки.
Проведенные работы – замена роторной группы, замена люльки и опорных вкладышей.



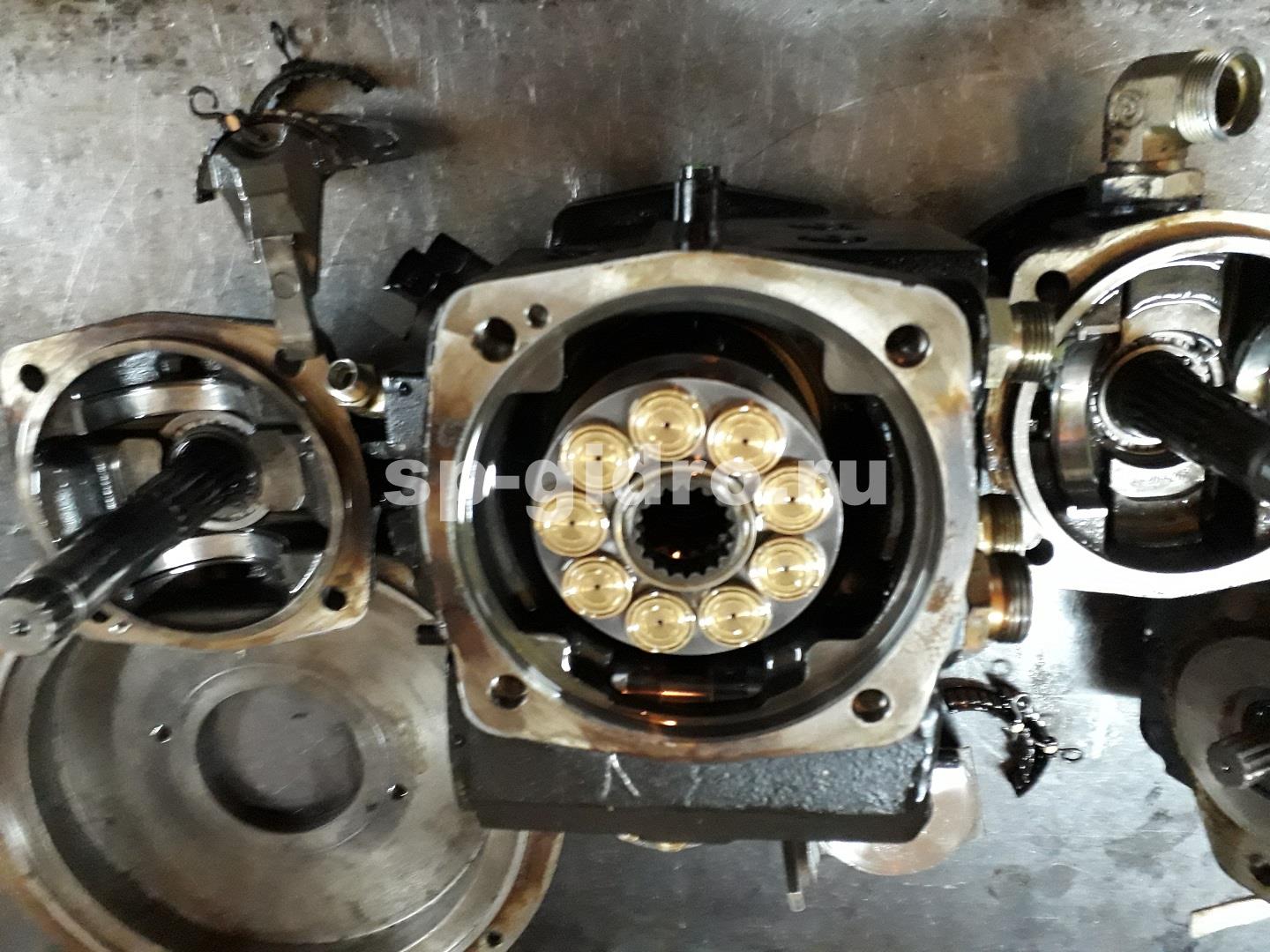
Неисправность при поступлении в ремонт – отсутствие управления на малых оборотах двигателя.
Выявленная причина неработоспособности насоса – износ люльки, износ опорных подшипников .
Проведенные работы – восстановительный ремонт, замена люльки и опорных подшипников.