
Гидропривод транспортного средства 4-Trac
Принципиальная схема гидропривода 4-Trac (привода на все колеса)
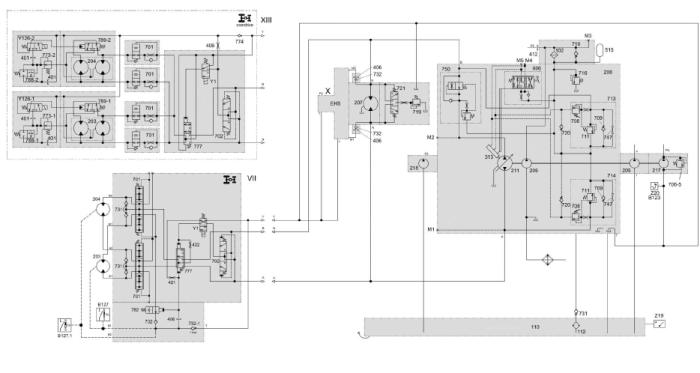
Гидравлическая схема привода
Обозначения:
102 Фильтровальный патрон - 10 мкм
109 Масляный радиатор
110 Масляный бак
112b Сетчатый фильтр привода ходовой части и рулевого управления
203 Привод 4-Trac, радиально-поршневой гидромотор слева
204 Привод 4-Trac, радиально-поршневой гидромотор справа
205 Шестеренчатый насос рабочей гидравлики - 19 или 14 см3/об.
207 Аксиально-поршневой нерегулируемый гидромотор - 100 см3/об.
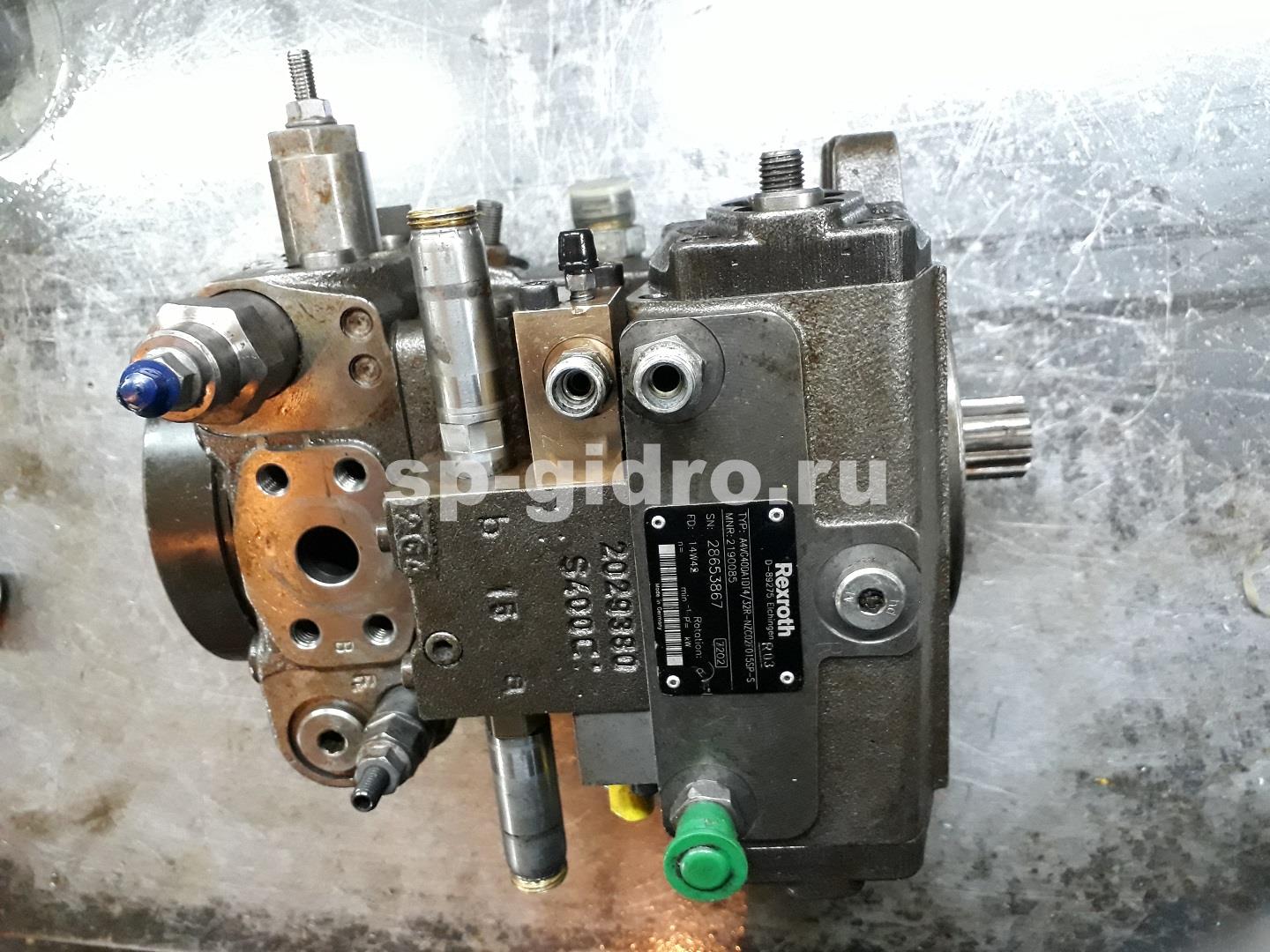
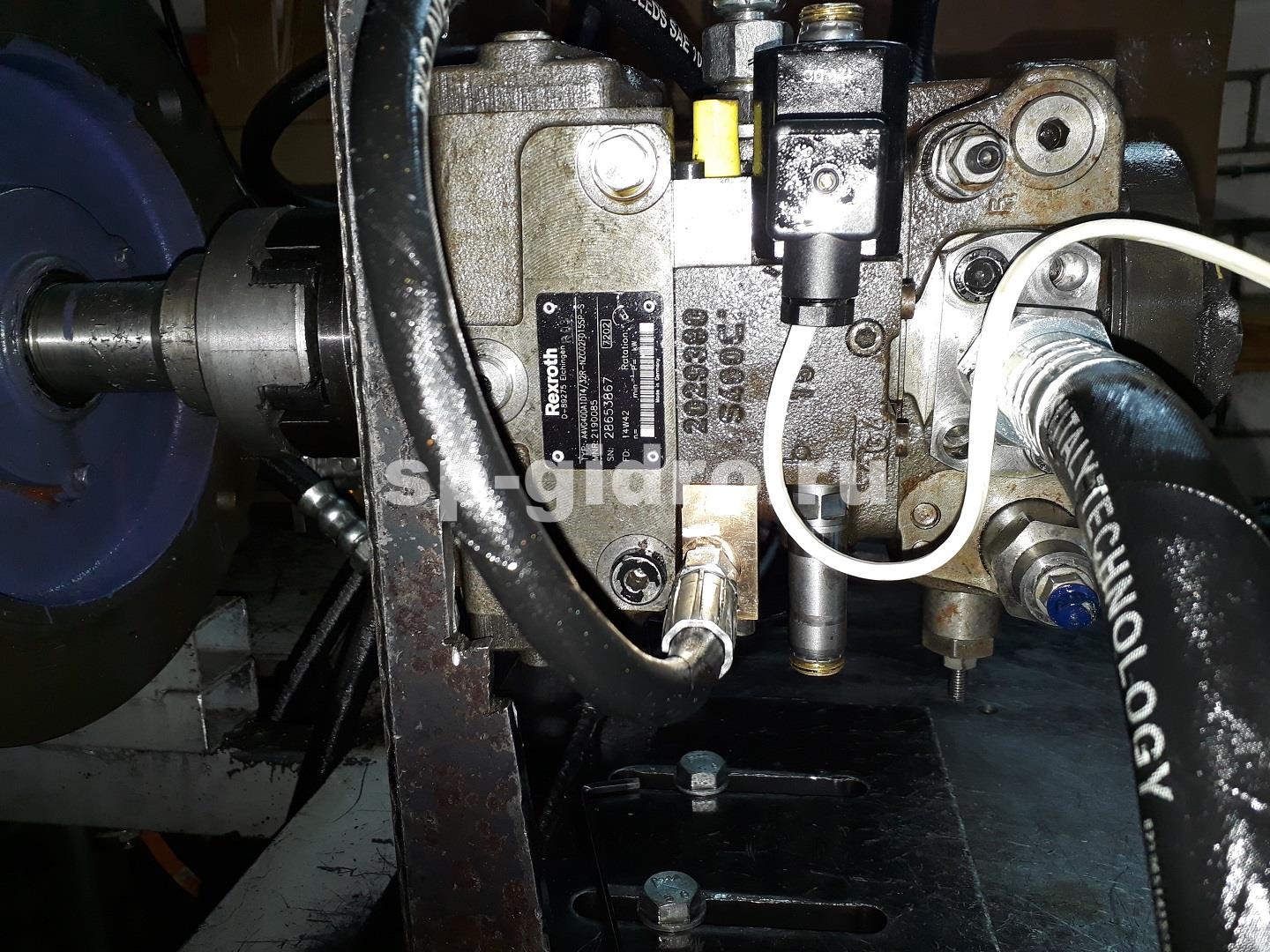
208 Привод ходовой части, регулируемый гидронасос.. Rexroth 90 R 100/130
209 Питательный насос - 26 см3/об.
211 Аксиально-поршневой регулируемый гидронасос - Rexroth 100 / 130 см3/об.
217 Насос привода корзины радиатора - 5,5 см3/об.
218 Шестеренчатый насос рулевого управления - 11 см3/об.
313 Сервоцилиндр
401 Диафрагма A
406 Диафрагма - Ø 0,8 мм
412 Диафрагма - Ø 2 мм
515 Гидроаккумулятор - 0,75 л
606 Сервоклапан
701 Клапан регулирования потока 4-Trac
706-5 Клапан ограничения давления
708 Клапан отсечки давления - 420+30 бар
709 Питательный клапан - 0,7 бар
710 Байпасный клапан - 3 бар
711 Клапан ограничения высокого давления - 430+30 бар
713 Мультифункциональный клапан назад
714 Мультифункциональный клапан вперед
716 Клапан ограничения давления питания - 30±2,5 бар
719 Промывочный клапан
720 Подпорный клапан - 7 бар
721 Переключающий клапан
731 Клапан обратной линии (обратный клапан)
732 Обратный клапан
747 Клапан короткого замыкания
750 Тормозной дроссельный клапан
751 Внешний питательный клапан (обратный клапан)
773 Регулятор давления
774 Подпорный клапан
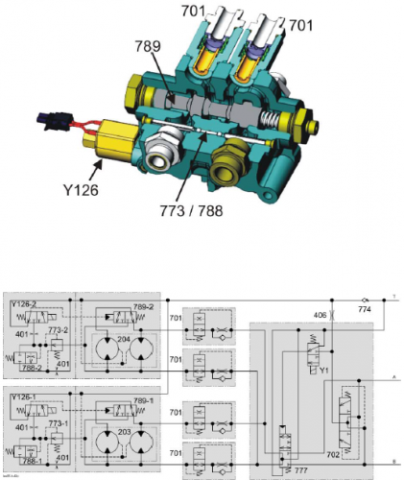
777 Главный управляющий клапан Привод 4-Trac (привод на все колеса) вкл./выкл.
788 Привод 4-Trac Overdrive, промывочный клапан
789 Привод 4-Trac Overdrive, подключающий клапан
Y1 Электромагнитный клапан привода на все колеса / 4Trac (управляющий клапан)
Y124 Тормозной дроссель гидравлики ходовой части (HBM)
Y126 Электромагнитный клапан Привод 4-trac Overdrive
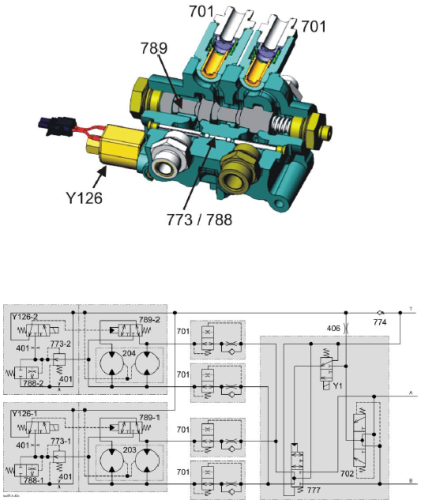
Клапанный узел MUD HOG
Описание функций:
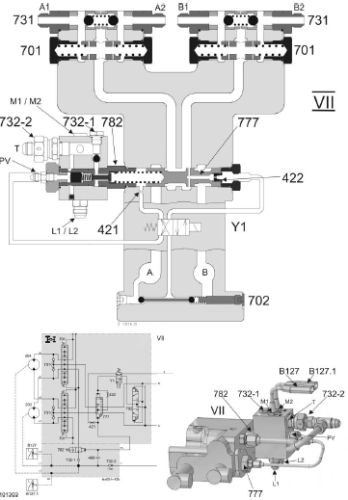
Через соответствующую сторону высокого давления в контуре высокого давления (А/В) производится переключение перекидного клапана (702), так что через соответствующую сторону низкого давления всегда имеется подпиточное давление на электромагнитном клапане (Y1). В зависимости от коммутационного положения электромагнитного клапана (Y1) подпиточное давление подается в зону пружины -ВЫКЛ.- или на противоположную сторону - ВКЛ.- управляющего золотника (777). Управляющий золотник (777) затем открывает поток масла (А/В) через соответствующий клапан регулирования потока (701) к колесным двигателям через выводы А1-А2 или В1-В2. Соответствующая обратная линия колесных двигателей В1-В2 или А1-А2 проходит через клапан обратной линии (731) на другой уровень клапанного узла к стороне низкого давления (В/А).
Клапаны регулирования потока (701) управляют дифференцированным потоком масла к колесным двигателям, с целью предотвращения ухода масла на более легкоходную сторону одного из обоих колесных двигателей. При этом колесный двигатель с большей нагрузкой создает подпорное давление на золотнике регулирования потока, который затем прикрывает кромку управления на противоположной стороне и обеспечивает балансировку уровня давления нагрузки обеих сторон.
Быстродействующий клапан (782)
При выключении привода 4-Track включается также быстродействующий клапан (782) и разгружает при этом напорную сторону двигателей через линия утечек масла в корпус. Небольшой поток масла через диафрагму (406) обеспечивает надежное положение покоя поршней в двигателях, так как обратный клапан (732-2) обеспечивает подпор корпуса двигателя.
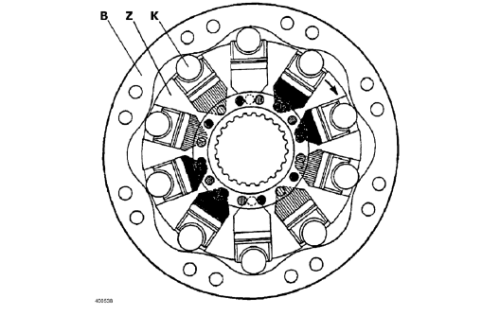
Радиально-поршневой гидромотор POCLAIN
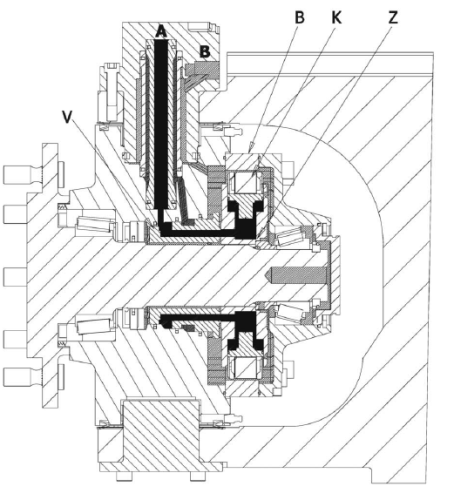
Описание функций:
Колесный двигатель выполнен в виде радиально-поршневого двигателя, при буксировке нет необходимости механически отсоединять его от привода. Если на двигатель передается усилие от ведущего колеса, то криволинейная направляющая (В) вытесняет десять поршней (К) в цилиндрический ротор (Z), благодаря чему колесная ступица может свободно вращаться. При подключенном приводе на все колеса масло подается на вывод А или В двигателя, в зависимости от направления движения. Распределительный блок (V) подает его при этом на поршни (К), находящиеся в ниспадающей позиции криволинейной направляющей (В).
Ролик на поршне (К) вследствие этого отталкивается от криволинейной направляющей (В) и приводит цилиндрический ротор (Z) во вращательное движение, которое через зубчатое зацепление переносится на колесную ступицу. Если поршень (К) перемещается по возрастающему профилю криволинейной направляющей (В), то масло вытесняется на сторону низкого давления контура высокого давления через цилиндрический ротор (Z) и распределительный блок (V).
Описание функций:
Для функции 4-Track Overdrive используются 2-ступенчатые радиально-поршневые двигатели. Функция Overdrive ВЫКЛ. Внутри каждого радиально-поршневого двигателя (203/204) два роторных комплекта параллельно соединены друг с другом через подключающий клапан (789). При двойном объеме поглощения скорость движения (скорость вращения) радиально-поршневых двигателей (203/204) снижается при одновременном увеличении передаваемого момента вращения.
Функция Overdrive ВКЛ. При включенном электромагнитном клапане 4-trac Overdrive (Y126) два роторных комплекта соединяются друг с другом последовательно через подключающий клапан (789). При уменьшенном объеме поглощения снижается передающий момент радиально-поршневых двигателей (203/204) при одновременном повышении скорости движения (скорости вращения).
Регулируемый двигатель
Описание функций: 1/4
Привод на все колеса представляет собой управляемый ведущий мост, каждое колесо которого приводится в действие аксиально-поршневым регулируемым двигателем со встроенным колесным редуктором. Гидравлическое обеспечение выполнено параллельно с гидростатическим замкнутым контуром машины. При возникновении проскальзывания (снижения тяги) на ведущем или управляемом ведущем мосту оно опознается и устраняется регулированием. Также и при затруднительных тяговых условиях система старается обеспечивать максимальную скорость уборки. Система определяет действительную скорость вращения каждого двигателя и на основе соответствующих данных машины (диаметр колеса, механическое передаточное отношение, количество импульсов в минуту и т.д.) рассчитывает окружную скорость колеса.
Эталон - при движении по прямой скорость самого медленного колеса используется в качестве базовой для остальных колес. Принимается, что эта скорость отображает скорость транспортного средства. Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается.
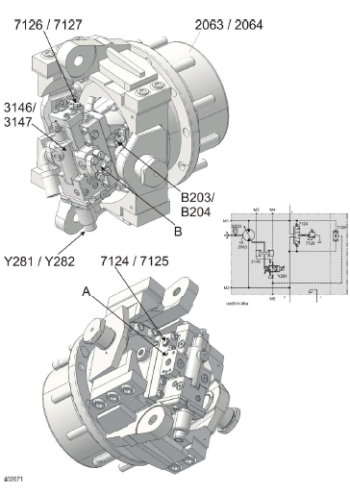
Регулирование аксиально- поршневых регулируемых двигателей (2063, 2064)
Регулируемый двигатель при этом находится в своем исходном положении с минимальным объемом поглощения. При помощи электромагнитной катушки с широтно-импульсной модуляцией (Y281, Y282) при этом из соответствующего контура высокого давления через переключающий клапан установочного давления двигателя привода ходовой части (7128, 7129) генерируется переменное давление управления на гидроцилиндр сервоуправления двигателем привода ходовой части (3146, 3147).
LTA ВЫКЛ. Вся система не активна.
В этом случае электромагнитные катушки регулирования аксиально- поршневого двигателя системы 4-Trac (Y281, Y281) обесточены. Регулируемые двигатели системы 4 -Trac (2063, 2064) установлены на минимальный объем поглощения (Qмин. = 0 литров).
LTA ВКЛ.
При разблокированном выключателе движения по дорогам (S52) и включенной системе 4-Trac (S4) электромагнитные катушки регулирования аксиально-поршневого двигателя системы 281-Trac (Y281, Y281) отдельно управляются с широтно-импульсной модуляцией в зависимости от:
- актуальной скорости
- смещения рычага движения
- соответствующего угла поворота
- направления движения производится регулирование объема поглощения аксиально- поршневых двигателей.
- Скорость Частота, замеренная сенсорами скорости вращения аксиально- поршневых двигателей системы 4-Trac (B203, B204), опознается в качестве скорости вращения (эффект Холла) и вводится в модуль управляемого ведущего моста (A79) в качестве сигнала. При скорости 0 км/час через электромагнитные катушке течет полный ток ок. 1300 мА, двигатели (2063, 2064) полностью выведены (Qмакс. = 50 см3).
- Рычаг движения
Начиная с 50% смещения рычага движения аксиально-поршневые двигатели (2063, 2064) переводятся в направление Qмин.
- Угол поворота рулевого управления
При движении на поворотах скорости колес устанавливаются в пропорциональной зависимости от их круга поворота, то есть воздействие рулевого управления учитывается в процессе регулирования.
Необходимый сигнал, касающийся положения рулевого управления, поступает от сенсора угла поворота колес автопилота (B6 . см. электрооборудование, схему 28) и по шине CAN подается на модуль управляемого ведущего моста (A79). Необходимо соответствующим образом отконфигурировать движение по прямой и размеры шин
Направление движения (Опознавание направления вращения)
Сенсоры скорости вращения системы 4-Trac (B203, B204) дополнительно могут опознавать соответствующее направление движения (направление вращения). При резком замедлении машины благодаря опознаванию направления вращения аксиально- поршневые двигатели переводятся на минимальный объем поглощения (Qмин. = 0 литров), этим предотвращается вращение двигателей в обратную сторону.
Сенсоры скорости вращения системы 4-Trac (B203, B204) работают по принципу сенсора Холла, они благодаря двум сигнальным микросхемам (A/B) могут опознавать полярность магнитного поля. При этом полярность северный полюс соответствует низкому уровню сигнала, а южный полюс - высокому уровню сигнала.
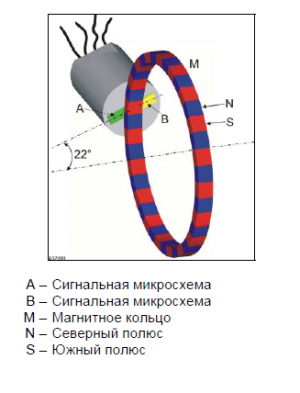 Сигнальные микросхемы установлены со смещением на 22° относительно кольцевой оси и благодаря этому обеспечивают перекрытие, равное ½ от длины полюса. Это означает, что при определенном направлении вращения микросхема A видит один полюс первой, и лишь затем этот же полюс опознается микросхемой B. Генерированные сигналы смещены по фазе на 90°. Правильное положение установки сенсоров скорости вращения системы 4-Trac (B203, B204) задано конструктивным образом.
Сигнальные микросхемы установлены со смещением на 22° относительно кольцевой оси и благодаря этому обеспечивают перекрытие, равное ½ от длины полюса. Это означает, что при определенном направлении вращения микросхема A видит один полюс первой, и лишь затем этот же полюс опознается микросхемой B. Генерированные сигналы смещены по фазе на 90°. Правильное положение установки сенсоров скорости вращения системы 4-Trac (B203, B204) задано конструктивным образом.
Регулирование против проскальзывания слева - справа Различия в скорости вращения опознаются сенсором скорости вращения аксиально-поршневого двигателя системы 4-Trac (B203, B204). Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается. впереди сзади. Также и здесь регулируемый двигатель (впереди / сзади) быстро вращающегося моста или колес переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося моста / колес увеличивается. Коммуникация между модулем привода ходовой части (A49) и модулем управляемого ведущего моста (A79) для опроса скорости вращения выполняется по шине CAN.
































Неисправность при поступлении в ремонт – малая скорость движения погрузчика, заклинивание управления при поворотах.
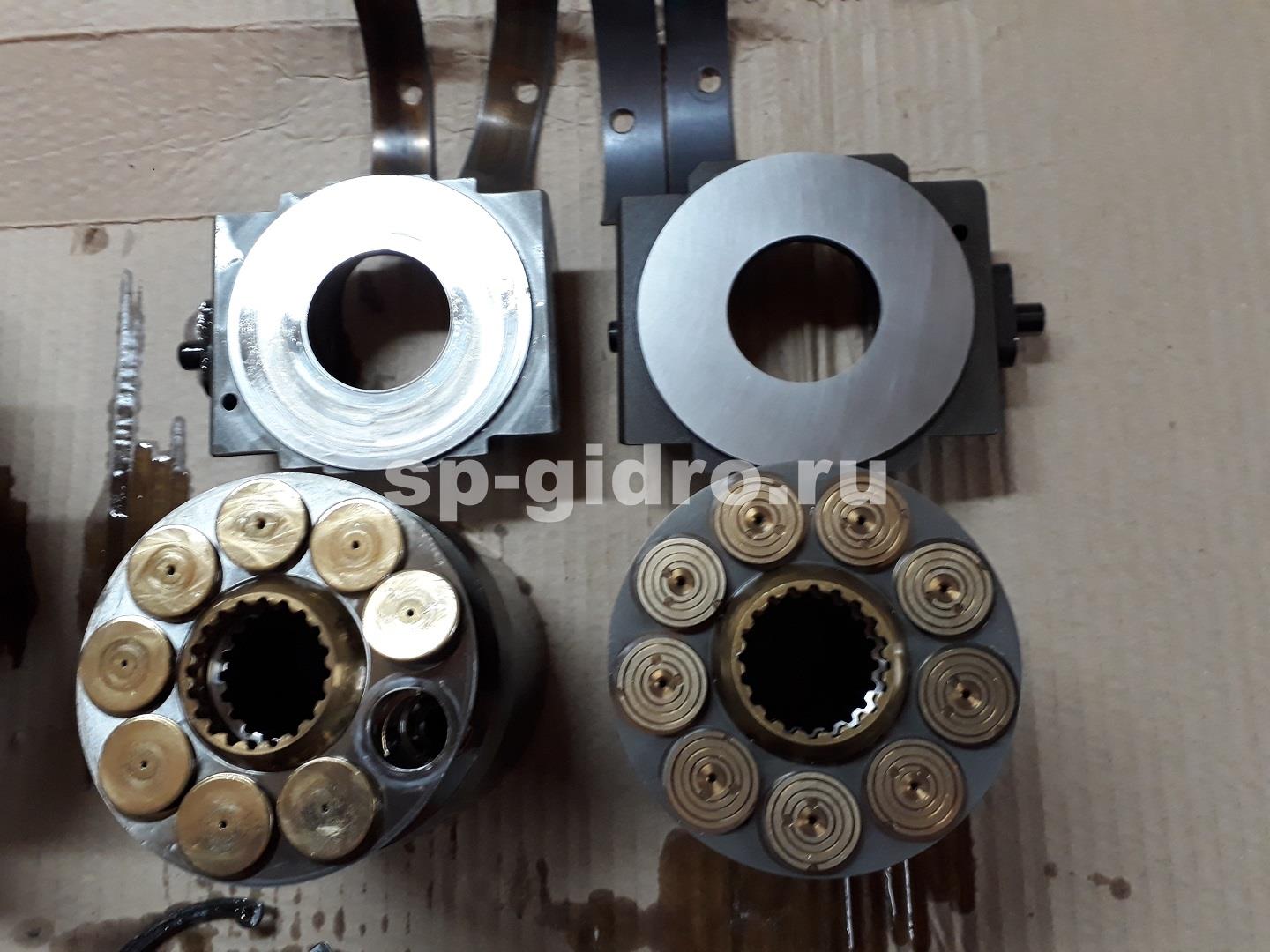
Выявленная причина неработоспособности насоса – износ подпиточного насоса, износ роторных групп.
Проведенные работы – ремонт подпиточного насоса, замена прижимной пластины, замена двух комплектов поршней, восстановление поверхностей наклонных плит (люльки), блоков цилиндров, распределительных пластин.






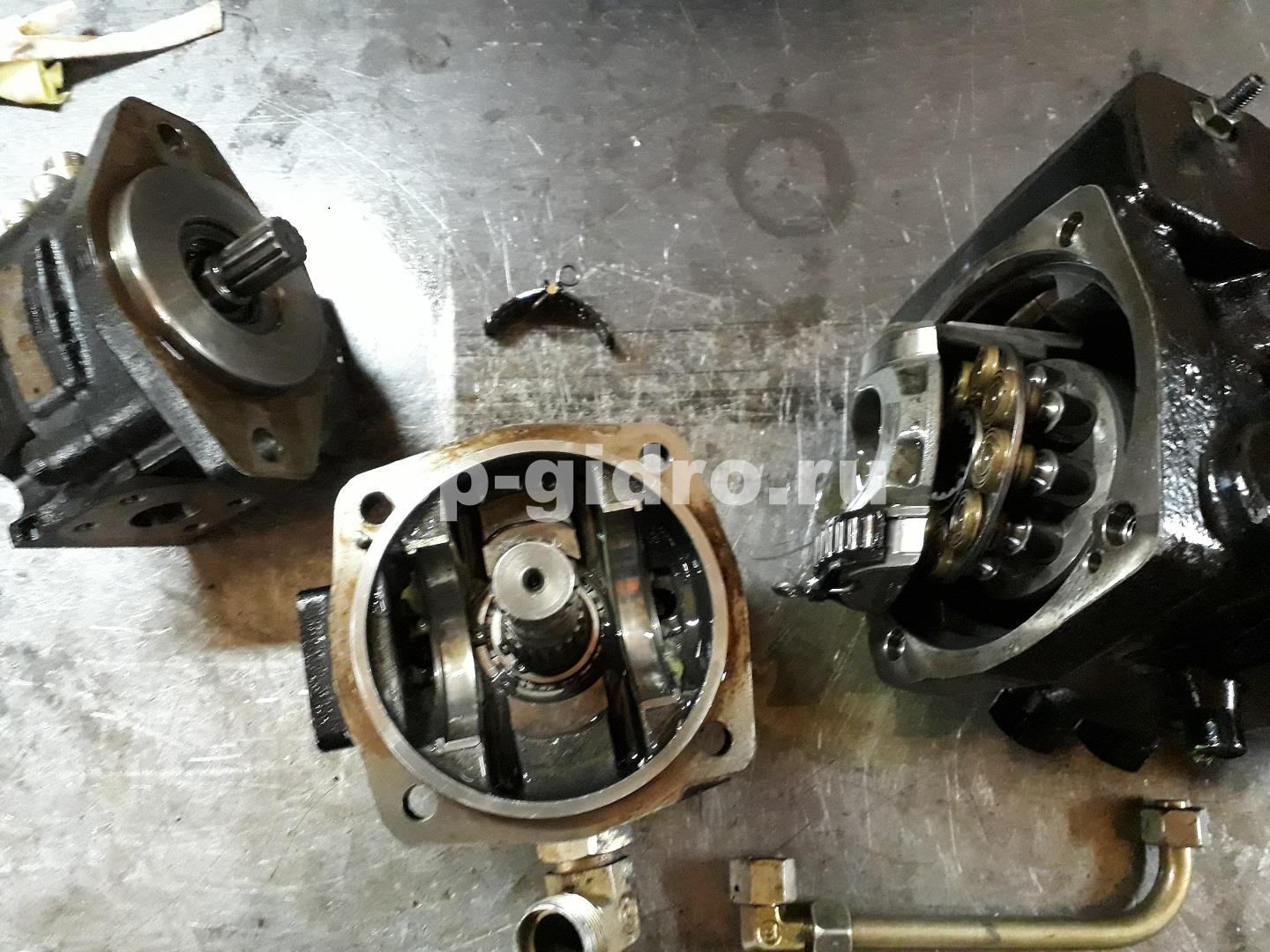
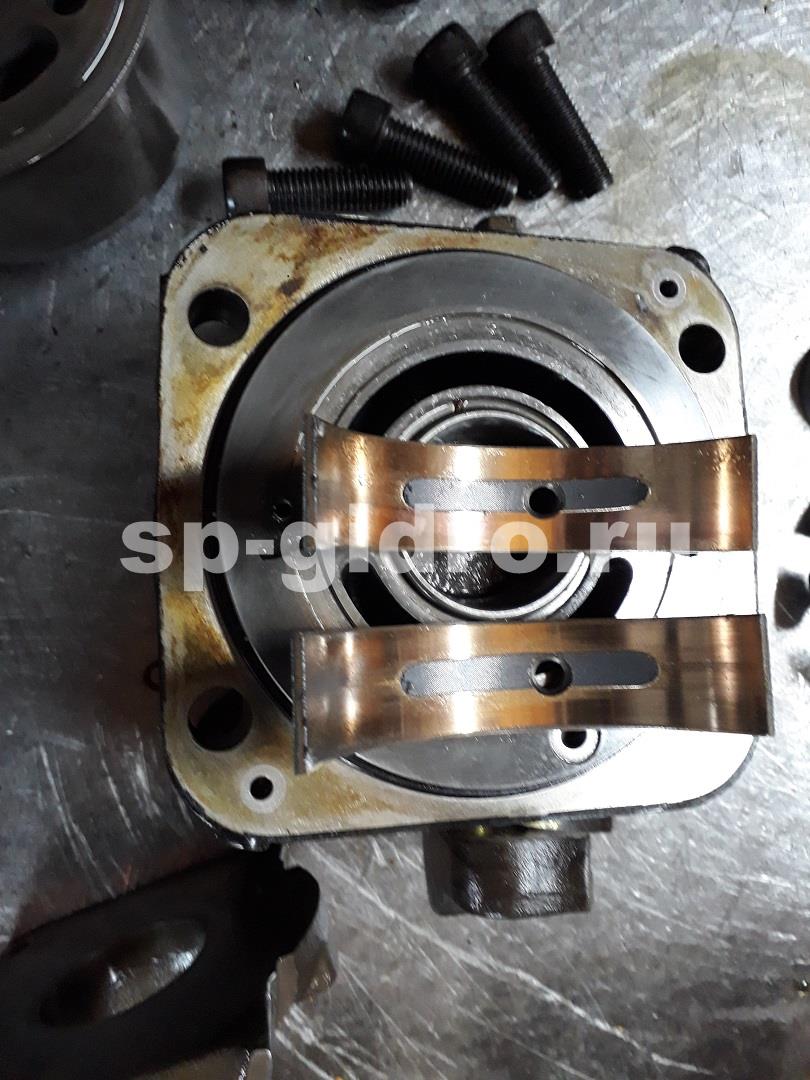
Неисправность при поступлении в ремонт – шум при работе насоса, недостаточное рабочее давление.
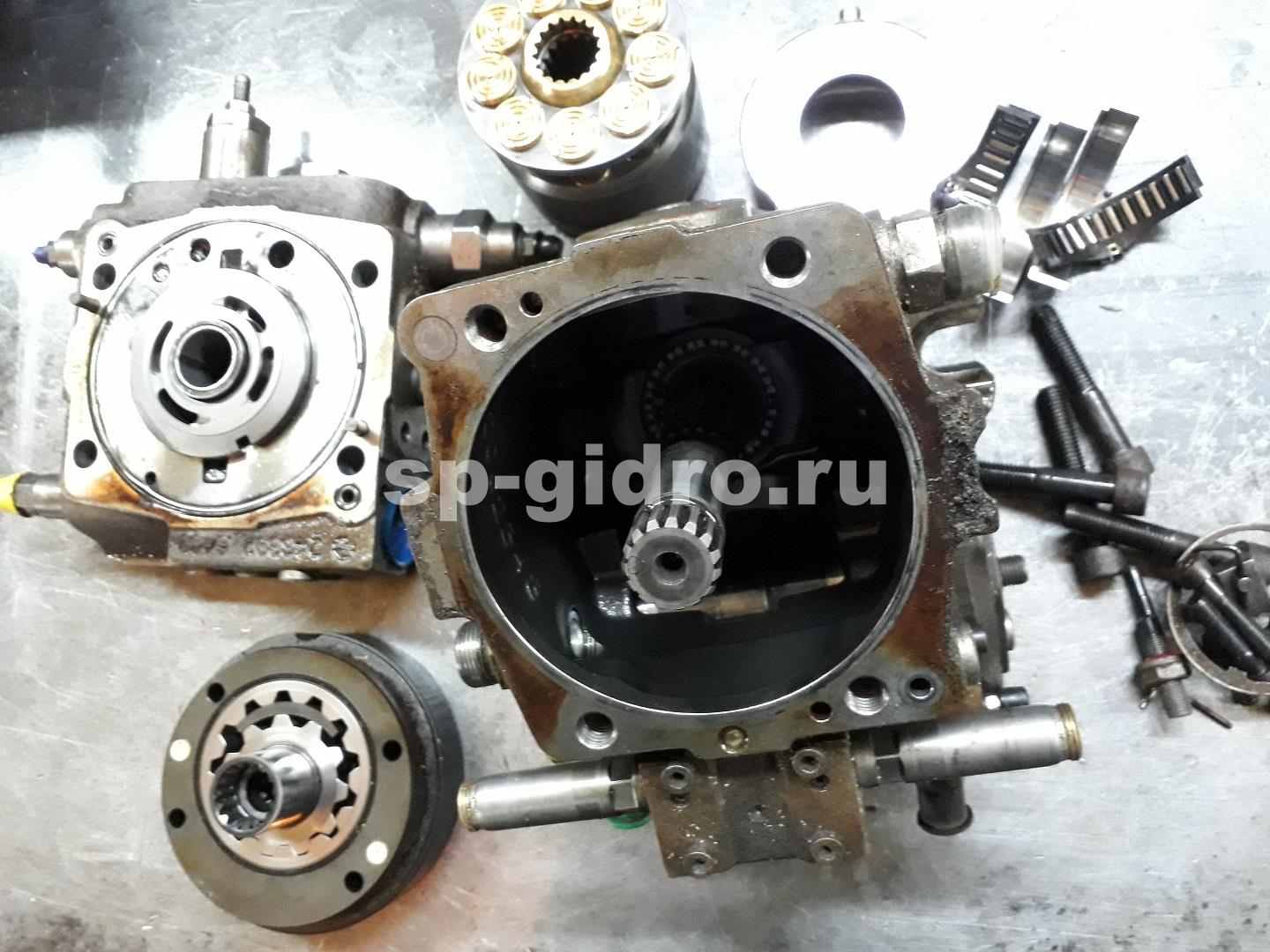
Выявленная причина неработоспособности насоса – разрушение переднего и заднего подшипников вала, повреждение посадочного места подшипника в задней крышки, деформация шлицов вала.
Проведенные работы – замена подшипников, замена вала, ремонт задней крышки.



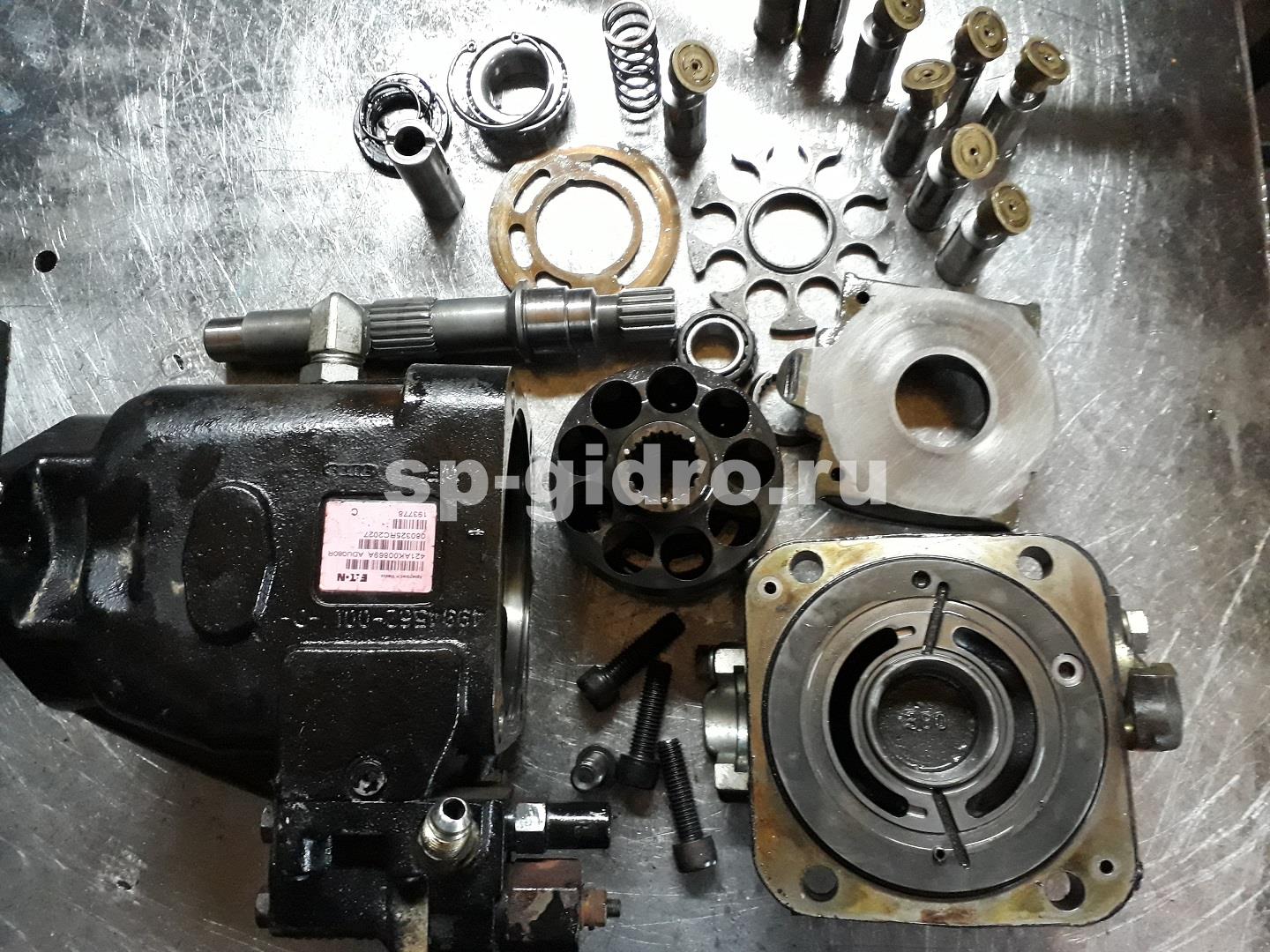

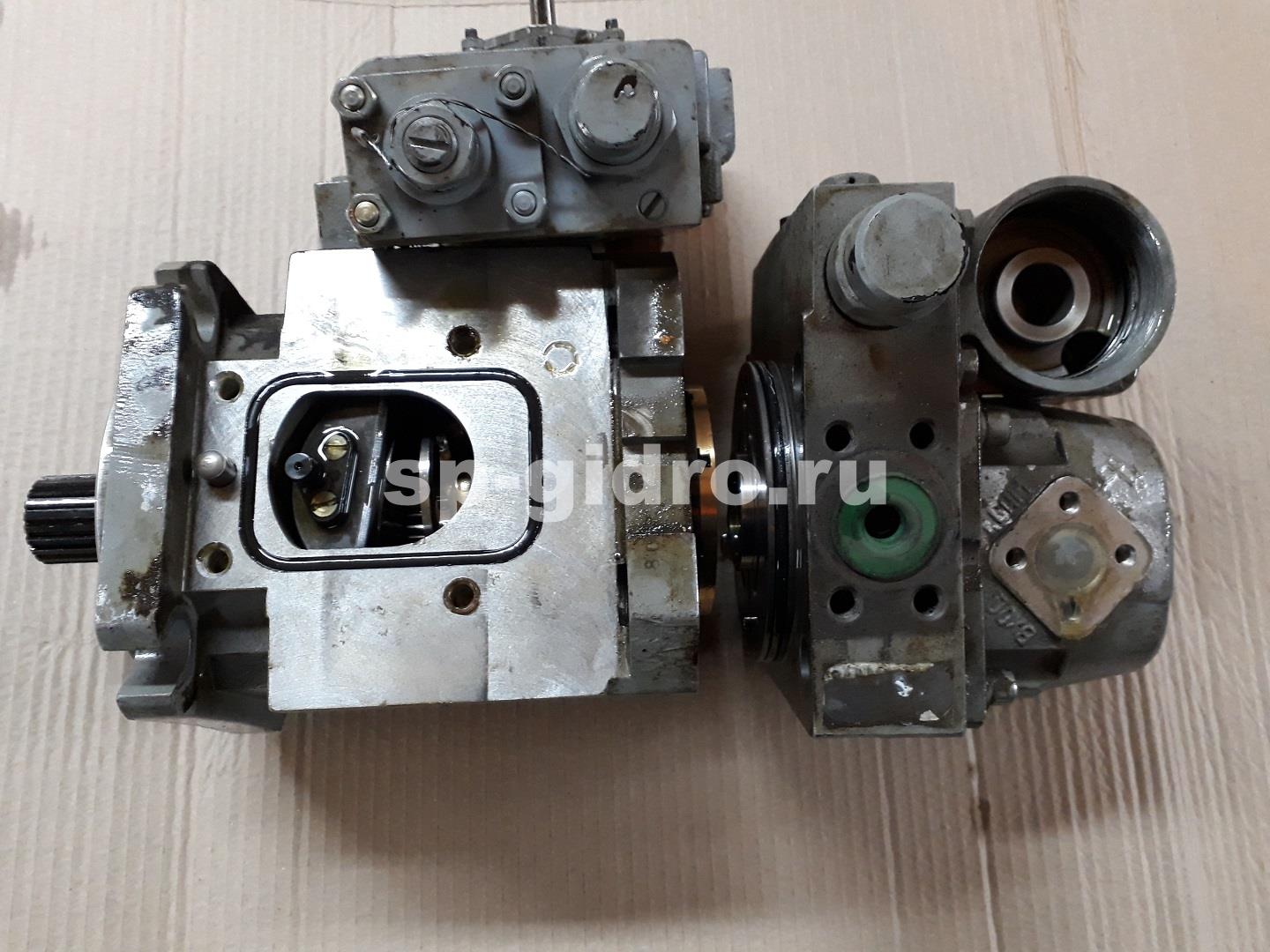
Неисправность при поступлении в ремонт – отсутствие подачи рабочей жидкости.
Выявленная причина неработоспособности насоса – заклинивание наклонной плиты (люльки) в нулевом положении.
Проведенные работы – замена люльки, замена опорных вкладышей.


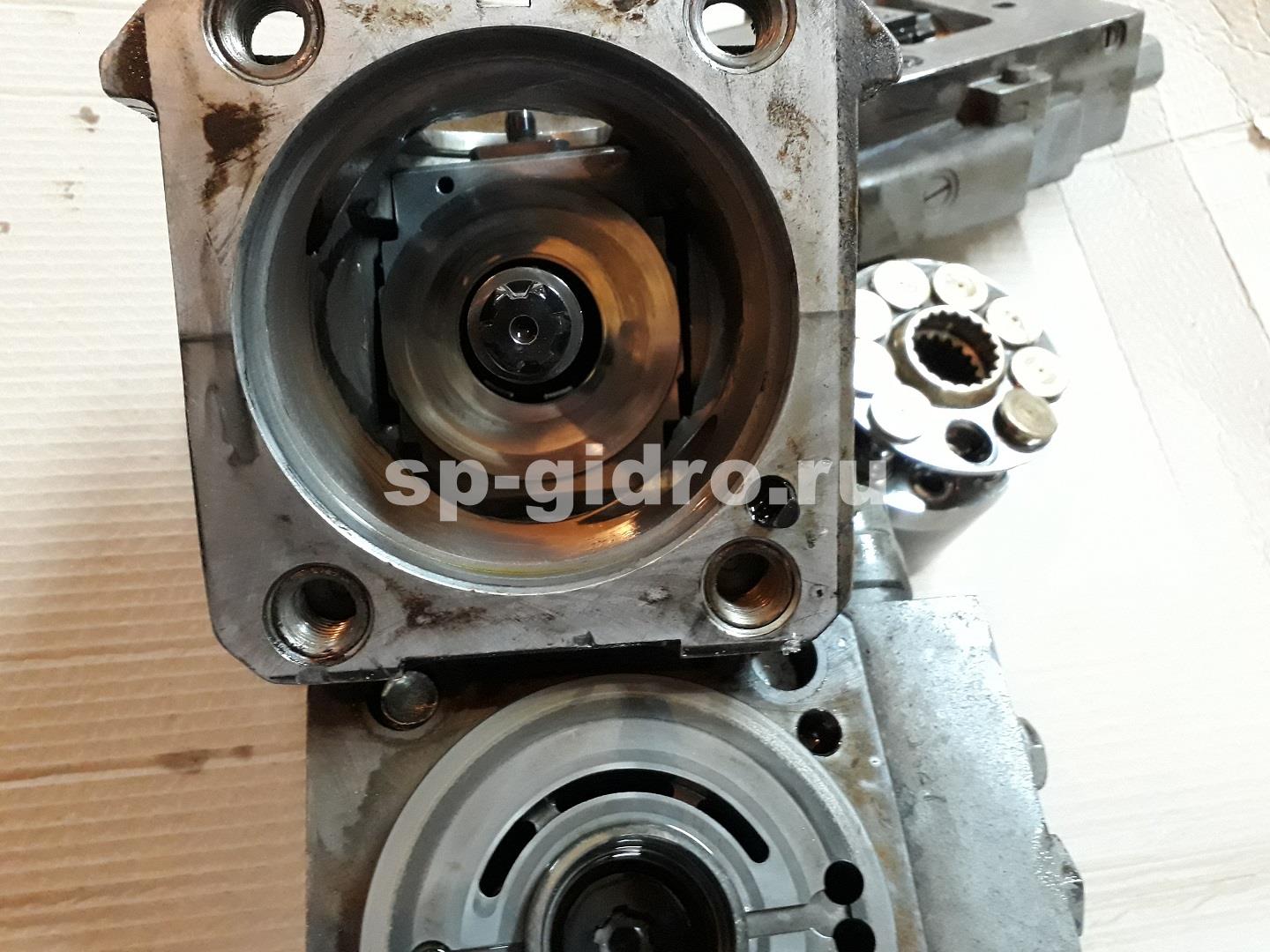

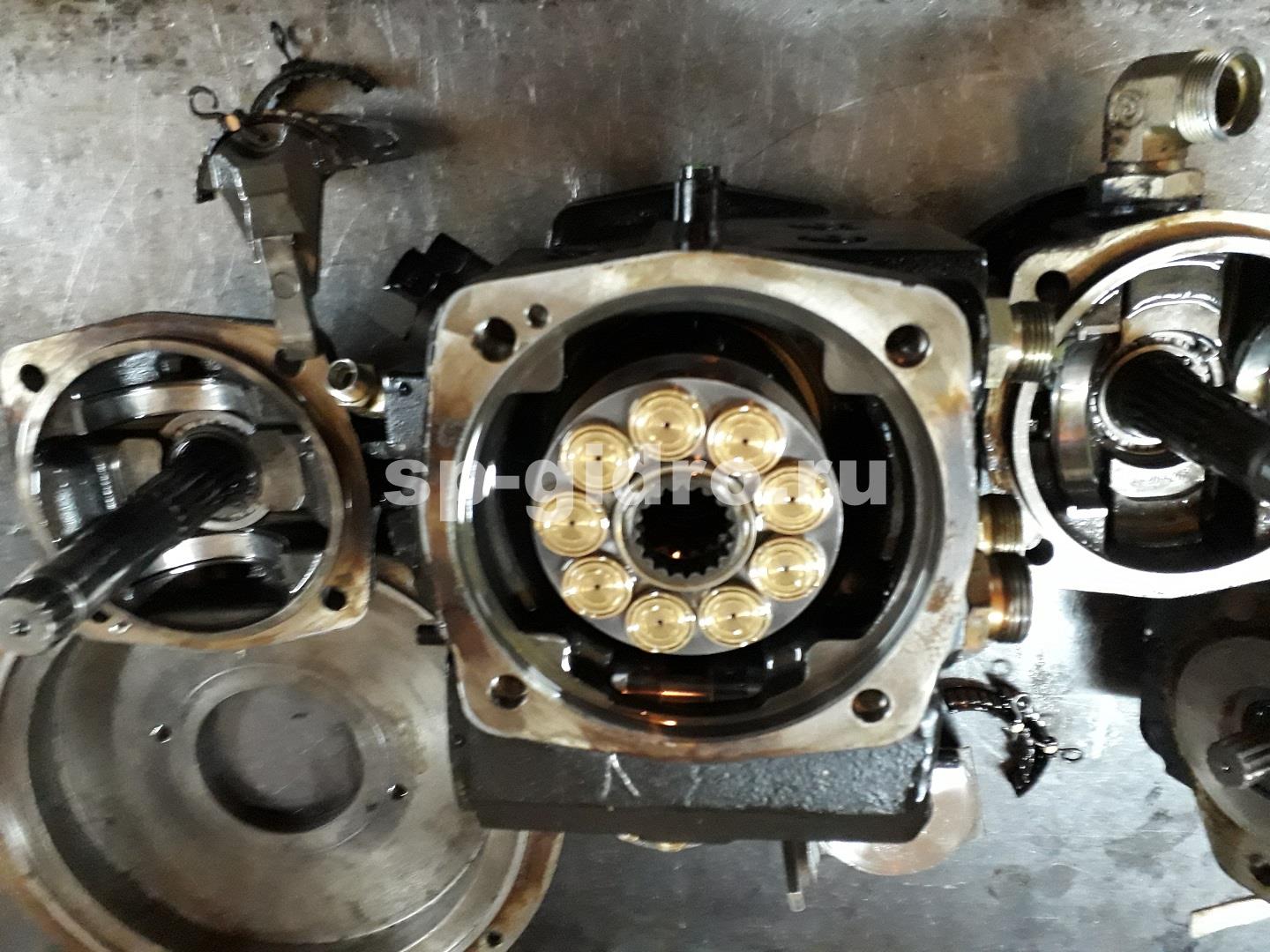
Неисправность при поступлении в ремонт – заклинивание одного борта погрузчика при движении, отсутствие поворота.
Выявленная причина неработоспособности насоса – отрыв башмаков поршней, повреждения люльки.
Проведенные работы – замена роторной группы, замена люльки и опорных вкладышей.



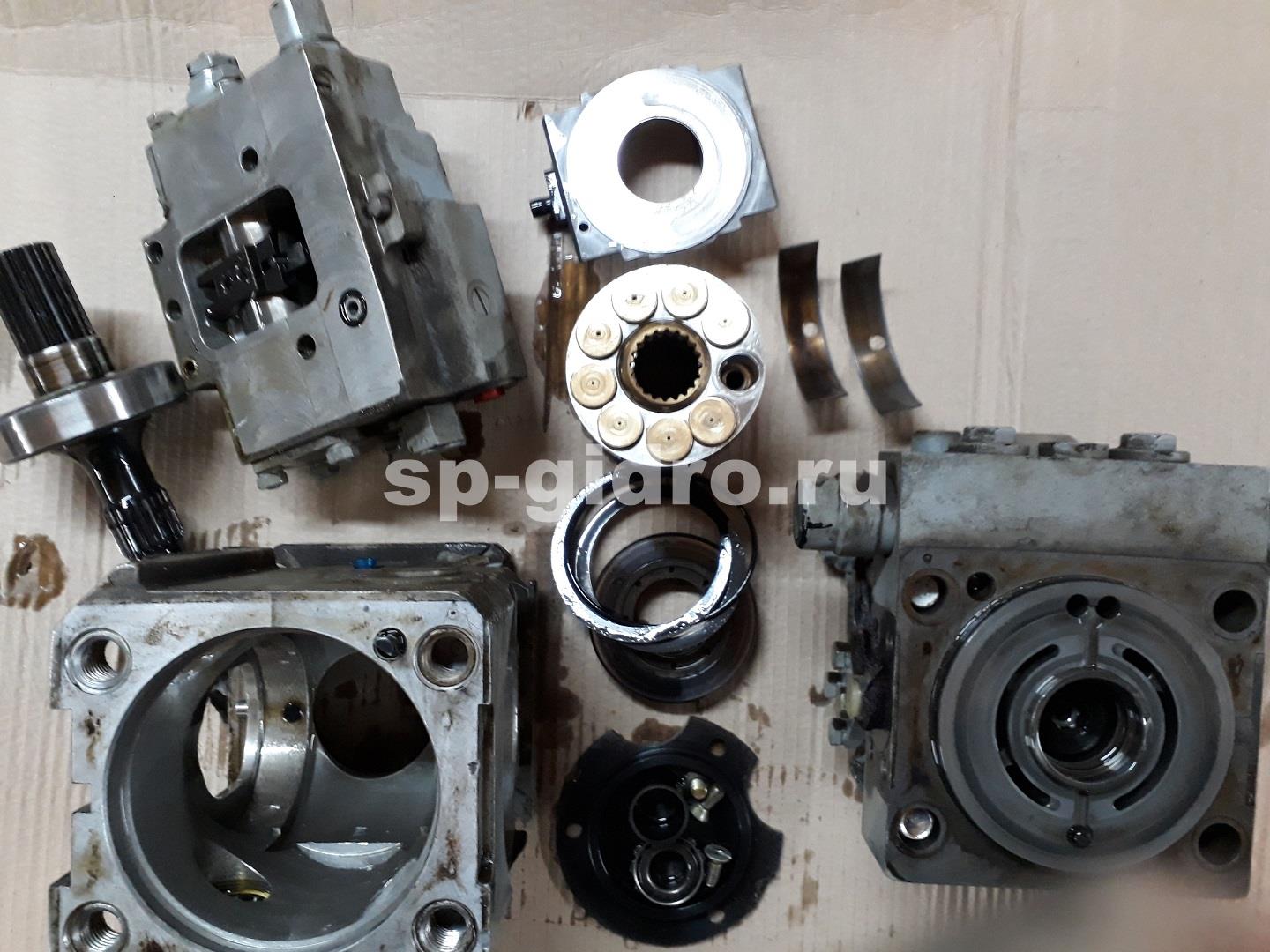
Неисправность при поступлении в ремонт – отсутствие управления на малых оборотах двигателя.
Выявленная причина неработоспособности насоса – износ люльки, износ опорных подшипников .
Проведенные работы – восстановительный ремонт, замена люльки и опорных подшипников.